[데일리포스트=김정은 기자] 미국 SF작가인 다니엘 수아레스(Daniel Suarez)는 IT 컨설턴트 출신으로, 컴퓨터 프로그램이 실제 위협으로 다가오는 미래를 담은 SF 소설 '데몬(Daemon)'과 대량생산된 자율주행 드론과 AI가 투입된 전쟁을 그려낸 '킬 디시전(Kill Decision)' 등을 집필했다.
2019년에 발표한 '델타-V(DELTA-V)'는 세계 최초의 상업적 소행성 자원 채굴 프로젝트를 그린 소설로, 작품에 등장하는 소행성 광물 자원을 채취하는 우주선 '콘스탄틴(Konstantin)'의 구조가 상세히 설명되어 있다.
수아레스는 지구 주변의 소행성이 태양계에서 인간의 행동 범위를 확대할 촉매가 될 수 있다고 주장한다. 그는 우주 자원 채굴은 매우 어려운 작업이며 지구상의 광물 채굴과는 전혀 다른 방법으로 접근해야한다고 지적한다.
그는 "소행성은 거의 완전한 진공 속을 이동하는 '거대한 산'이라고 할 수 있다. 표면에 채굴을 위한 장비를 고정하는 일부터 쉽지 않다. 임무를 맡은 우주비행사는 태양 플레어에 의해 방출되는 우주광선(cosmic ray)과 극미중력(microgravity)의 영향에 노출된다"고 언급했다. 또한 고립된 환경이라는 심리적 압박과 갑작스런 문제 발생에 대한 대처 등 소행성 채굴은 매우 어려운 임무라고 덧붙였다.
소설 '델타-V'는 소행성 '류구'(Ryugu:162173)'의 자원 채굴을 다룬 SF 스릴러로 주인공들이 탑승하는 소행성 자원 채굴선 콘스탄틴이 중요한 역할을 한다. 수아레스는 콘스탄틴 구조를 설계하기 위해 철저한 사전 준비 작업을 거쳤고, 물리학·항공우주기술자·소행성 채굴 사업가 등 다양한 각계 전문가와 회의를 거듭했다.
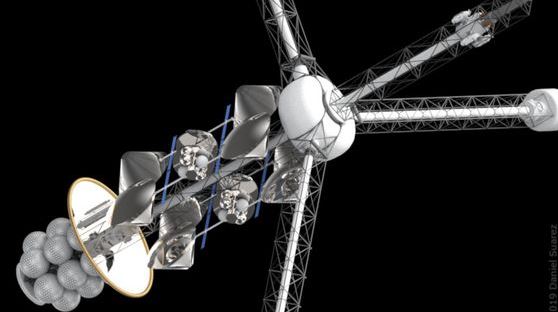
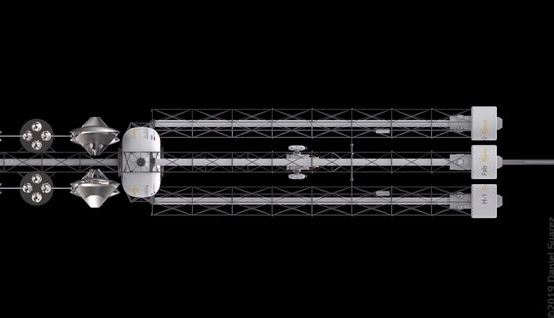
이렇게 설계된 콘스탄틴의 모습은 아래와 같다. 중앙 허브에 3개의 로봇 팔(arm)이 탑재된 형태이며, 각 끝부분에는 작은 스테이션이 붙어있다. 로봇 팔 형태의 긴 공간은 길이 106m로 중앙 허브를 중심으로 분당 3회 속도로 회전해 스테이션에 지구와 유사한 중력을 발생시킨다.
3개의 스테이션 가운데 2개는 거주 공간이고 1개는 다양한 실험용 스테이션이다. 실험용 공간에는 ▲컴퓨터 제어 CNC 밀링머신 ▲3D프린터 ▲화학·지질학·로봇 공학 실험실 등이 있다.
로봇 팔은 터널 형태로 되어 있어 채굴선 탑승자들은 각 스테이션과 중앙허브를 오갈 수 있다. 3개의 로봇 팔이 중앙 허브와 연결되는 각도가 비대칭인 것은 주거 공간과 실험용 스테이션의 질량 차이를 보정하기 위한 것이다. 또한 팔 부분에 웨이트(추)도 탑재돼 있어 사람과 물자의 이동에 따라 변동되는 균형을 자동 조절한다.
류구에 접근하면 콘스탄틴은 탑승자를 태양 플레어로부터 보호하기 위해 채굴선 대부분을 류구 그림자로 숨기고, 태양광 어레이를 갖춘 부분만 태양이 닿도록 조정한다.
류구 중력은 지구의 6만 2000분의 1 수준에 불과하다. 따라서 콘스탄틴은 중력을 이용해 류구를 도는 대신, 소행성에서 얻은 가스를 연료로 한 자동 제어 시스템으로 스테이션 위치를 유지한다.

중앙 허브 아래쪽에 위치한 대형 광학 마이닝 로봇인 ‘허니 비(Honey Bee)’ 모습이다. 실제 소행성 채굴기업 트랜스아스트라(TransAstra)가 설계했다.
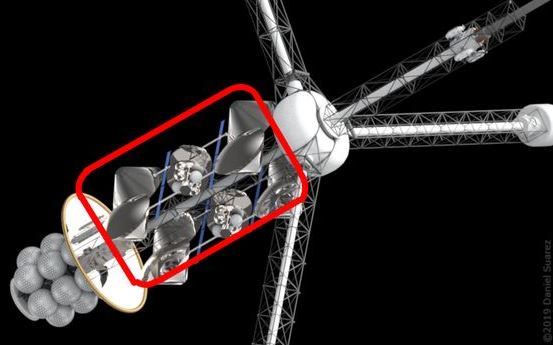
허니 비는 소행성 표면에 존재하는 암석을 깍아 수집하고, 2개의 반사경을 통해 태양광을 모아 암석을 가열해 표면을 파쇄할 수 있다. 암석에서 얻은 휘발성 물질 및 레골리스(regolith·표토)는 그 후에 처리된다. 허니 비 아래에 보이는 것이 반사형 솔라쉴드(Solar Shield)로, 콘스탄틴 연료인 메탄/액체산소의 추진제를 음영으로 유지시킨다.
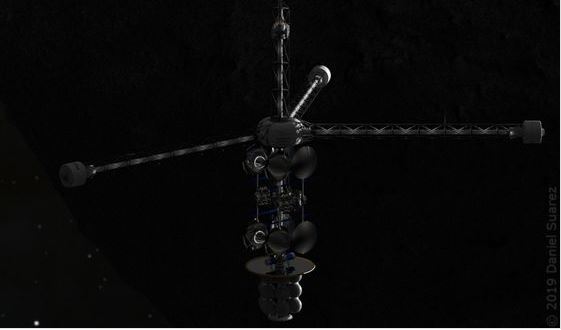
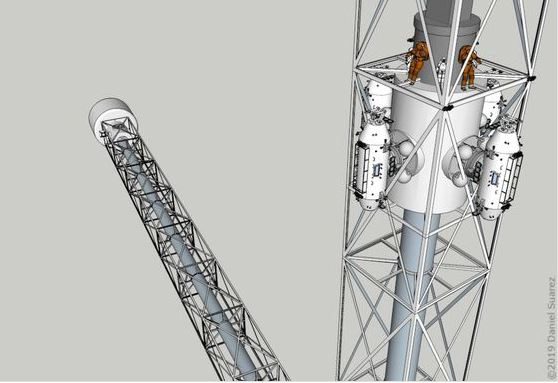
또한 메인엔진을 사용할 때는 안전성을 위해 3개의 팔은 아래의 모습처럼 접힌 상태가 된다. 메인엔진 연소는 지구에서 떠날 때와 류구 궤도에 콘스탄틴 궤도를 일치시킬 때 두 차례 이루어진다.
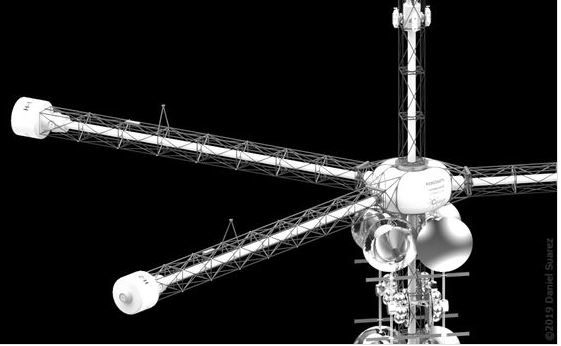
중앙 허브 상단의 빨간 네모 부분이 콘스탄틴 출입구다.
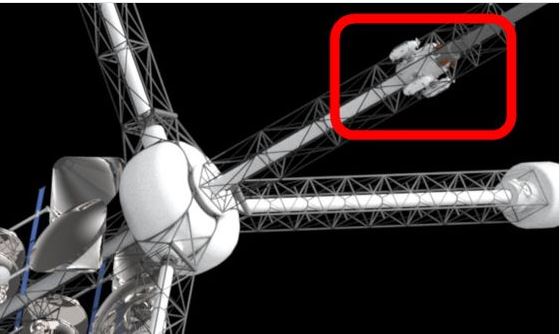
선단 스테이션에서 중앙 허브로 갈수록 중력이 감소하기 때문에 중앙터널로 출입구까지 이동한다. 스테이션 간 이동은 15분 정도 소요된다.
아래는 거주 공간인 스테이션 내부 모습이다. 스테이션 벽은 미세 운석과의 충돌에 견딜 수 있는 두께 0.5m의 라미네이트로 제작됐다. 위층은 거실, 아래층은 욕실·물탱크(400리터)·산소발생기 등의 수납공간으로 이루어진다.
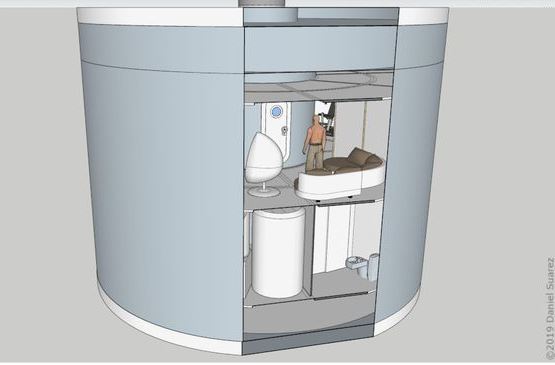
또한 위층에는 시스템키친, 운동기구, 의료 시설 등이 있고, 아래에는 작업 공간 및 수경재배 키트등이 위치한다. 상하층을 통과하는 중앙부가 침실이다.
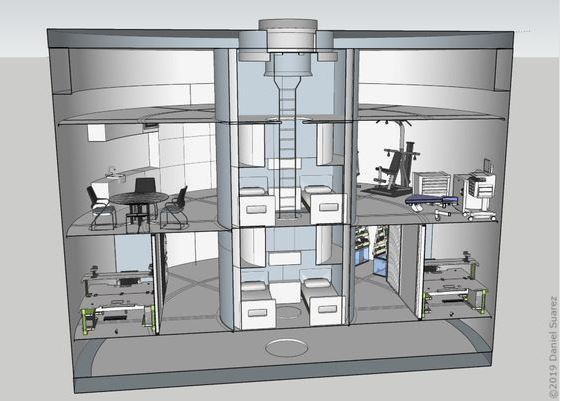
수경재배 키트는 신개념 농법 '아쿠아포닉스'를 활용한다. 아쿠아포닉스는 물고기 양식(Aquaculture)과 수경재배(Hyonics)의 합성어로 물고기와 작물을 함께 길러 수확하는 방식이다. 물고기를 키우면서 발생하는 유지물질이 식물의 영양분이 되고, 식물은 수질을 정화시켜 물고기의 사육에 적합한 수질 환경을 유지하는 장점이 있다. 위층과 아래층은 벽에 설치된 사다리를 통해 이동한다.

- 허블 망원경, 목성의 새로운 기류 변화 포착
- 인공지능(AI), 새로운 우주 행성 50개 발견
- NASA, 허블우주망원경으로 촬영한 최신 토성 사진 공개
- 우주 공간에 사람이 맨몸으로 내던져진다면 어떻게 될까?
- 현실로 다가온 머스크의 꿈...민간 최초 우주정거장 도킹 성공
- ‘우주호텔’ 건설 나선 NASA…영화 속 장면 현실이 된다
- 현재의 기술로 우주 엘리베이터 건설이 가능할까?
- NASA, 달 4G 네트워크 구축 사업자로 노키아 선정
- 고양이처럼 공중에서 자세 잡아 착지하는 로봇 등장
- 미래 산업 '우주 태양광 발전'....현실화 가능할까?
- 日 초대형 건담 공개...만화 속 로봇 크기 그대로 재현
- 日 소행성 탐사선 '하야부사2'..6년 여정 마치고 귀환
- '우주 슈퍼 하이웨이' 발견..행성 간 중력 이용해 초고속 이동
- 우주에서 지구로 쏟아지는 미세운석...'매년 5000톤 이상'