[데일리포스트=정태섭 기자] 미국 사우스캘리포니아대(USC) 연구자들이 인공지능(AI) 기술을 통해 학습하지 않은 보행 동작을 스스로 익힐 수 있는 ‘로봇 다리(Robotic leg)’를 개발해 학술전문지 ‘네이처 머신 인텔리전스’ 3월호에 게재했다.
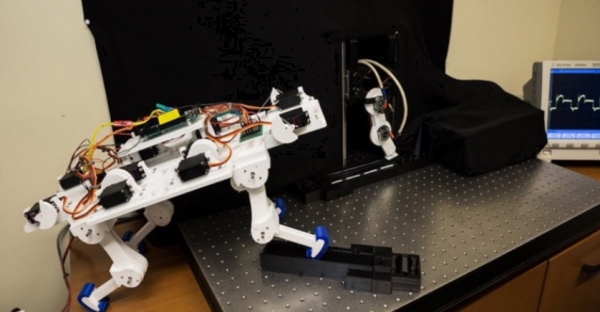
일본 로봇 전문지 ‘로보스타’ 13일 보도에 따르면 3개의 힘줄(tendon)과 2개의 관절을 가진 이 로봇은 보행 관련 사전 프로그래밍 없이도 스스로 보행 방법을 터득한다.
프로젝트를 이끌고 있는 프란시스코 J. 발레로-쿠에바스(Francisco J Valero-Cuevas) USC 교수는 “현 단계에서 로봇이 주변 세계를 이해하거나 상호 작용을 하기 위해서는 수개월 또는 수년간의 훈련 과정이 요구된다”며 “자연계의 동물처럼 빠르게 학습하고 환경에 적응할 수 있는 로봇을 개발하는 것이 연구 목표다”라고 언급했다.
연구팀은 생체 모방 알고리즘을 개발해 보행 방법을 학습하도록 했다. 로봇은 5분 정도 자유롭게 움직이면서 추가적인 프로그래밍 과정 또는 시뮬레이션 과정 없이 새로운 보행 방법을 배워 나간다. 좀 더 구체적으로는 다리 움직임과 관련된 맵을 만들고 주변 환경과 상호 작용을 한다는 것.
이번에 개발한 기술을 한층 발전시켜 개개인의 특성을 반영한 동작을 지원하는 ‘웨어러블 로봇’ 등에 활용할 방침이다. 또 지구에서 훈련을 받은 휴머노이드 로봇이 화성과 달 등 보행 학습을 하지 않은 우주 공간에서도 동작할 수 있다고 연구팀은 설명했다.
정태섭 기자
jt1234@TheDailyPost.kr